 |
|
You are here: SedWiki>Platforms/Misc Web>PlatformsObsolete>CyCabRobot>HardwareCycab (31 Jul 2013, SorayaArias)Edit Attach
Hardware du Cycab
Infos PC
- Carte Mère des anciens PC embarqués (fournis à l'achat des 2 Cycabs):
Cycab Gris Cycab Rose ROCKY-4783EV ROCKY-568SEV
- Carte RS422 pour liaison série à 500 kbps (interface Sick) :
- Carte CAN de type PCI :
- Dongle CAN-USB
Infos Robot
- ID Noeud :
Cycab Gris Cycab Rose f555 = 0x4001 r555 = 0x4000 - Codeur Direction/Roues :
- Fabricant : IVO Industries devenu Baumer
- Types:
Direction Roues Codeur absolu parallele GA241 Codeur incremental GI338 Resolution : 13 bitsResolution : 500 impspar tour
- Variateurs de puissance PWM :
- Fabricant : Advanced Motion Controls
- Type : 50A8DDx pour les moteurs de traction et 30A8DDx pour le vérin de direction
- documentation
- Freq hachage = 20 kHz
- Variateurs de puissance analogiques (non utilisés sur les Cycabs de l'INRIA Rhône-Alpes):
- Fabricant : Curtis
- Type : 1237-41xx pour les moteurs de traction
- documentation
- tension de commande : +/- 10Volts
- Parametres Moteur
- Fabricant : Moteurs Bobinages Rouillacais (MBR) en liquidation judiciaire depuis fevrier 2009
- Type : CF80 104 F75 - moteur a aimants continus avec frein a manque de courant
- Input : 48V - Amperage : 21A
- Puissance : 900W - 2800 Tr/mn
Vitesse max moteur 2800 rpm, soit3,62 m.s-1(ou13 km/h)Resolution roue moteur 2000tops ( 4 * 500 imp) par tour moteur
après décodage quadratureRapport de réduction 17Pour un déplacement de 1 m (2000 * 17) / (0.42 * PI) = 25768 tops
- Pametres physiques
Diamètre des roues 420mmDistance entre 2 roues d'un meme train 1,18mDistance entre train avant et train arriere 1,21mAngle de braquage max 28,75degres
- MPC555 Documentation
- Alimentation : 8 batteries Tudor TD 60 (12V - 60Ah)
 Infos Capteurs exteroceptifs et autres interfaces
Infos Capteurs exteroceptifs et autres interfaces
Joystick 2 axes + switch
- fabricant : CHProducts
- modèle : HFX-22S12-034
- documentation : HFX-22S12-034
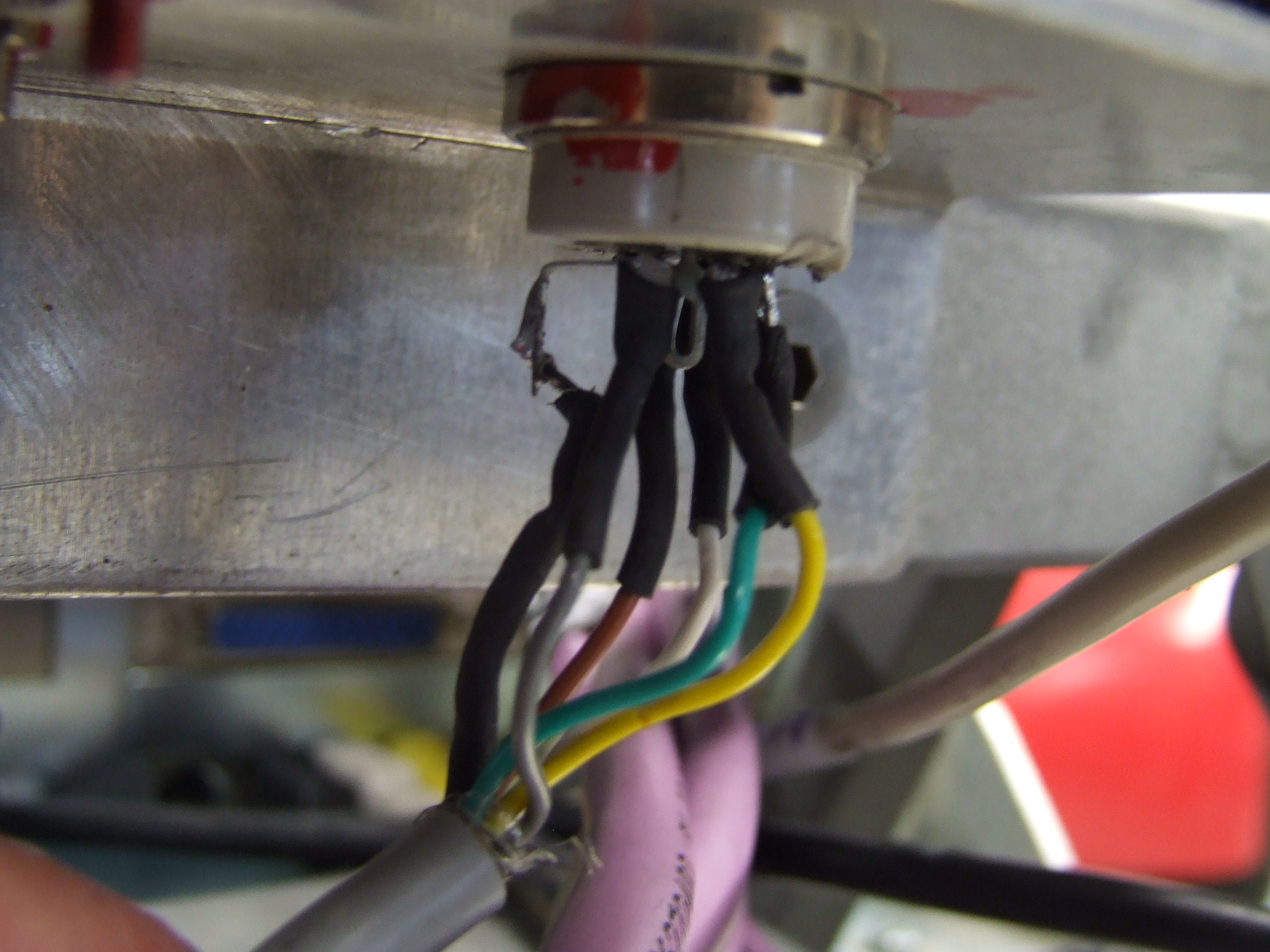
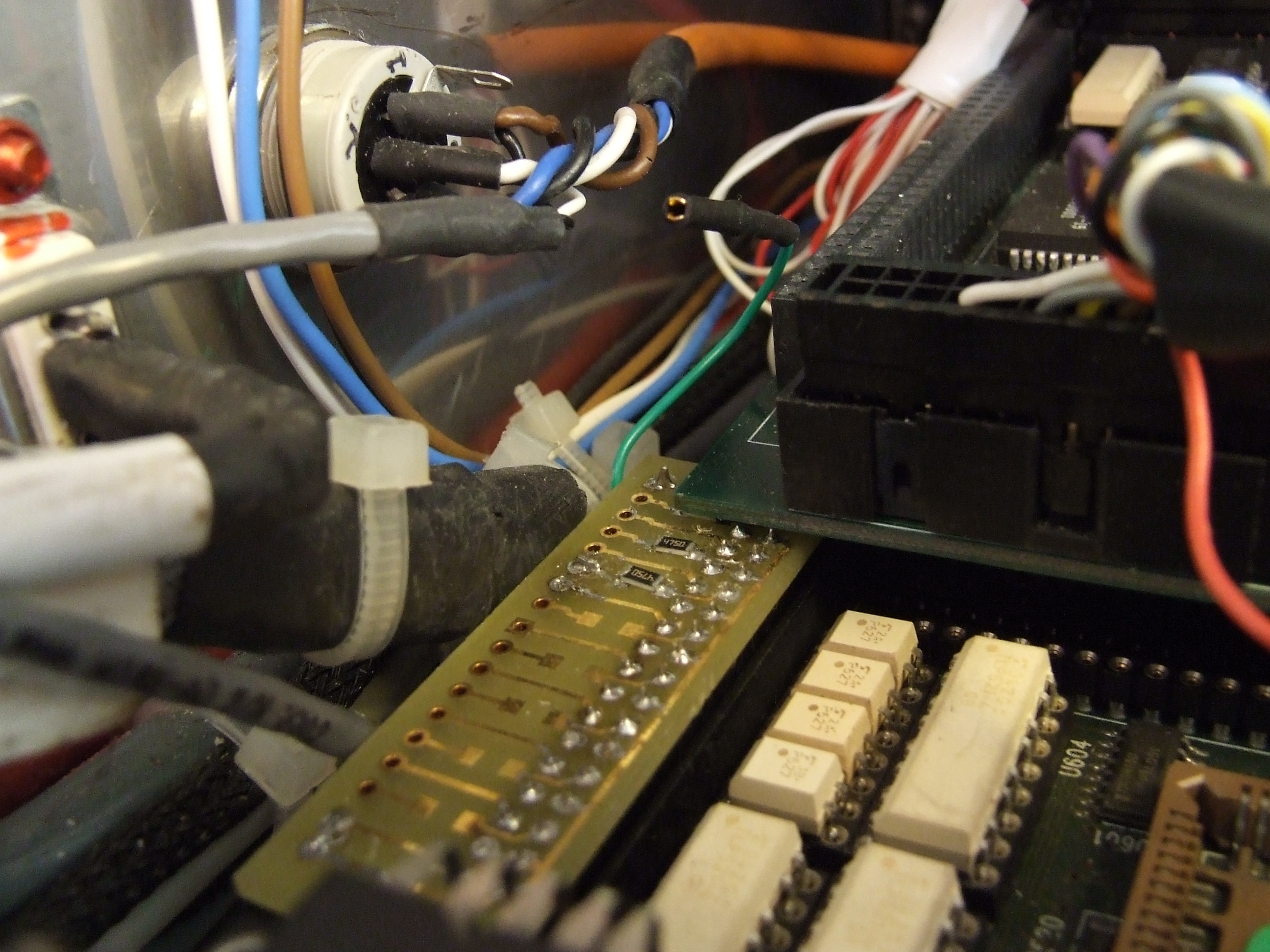
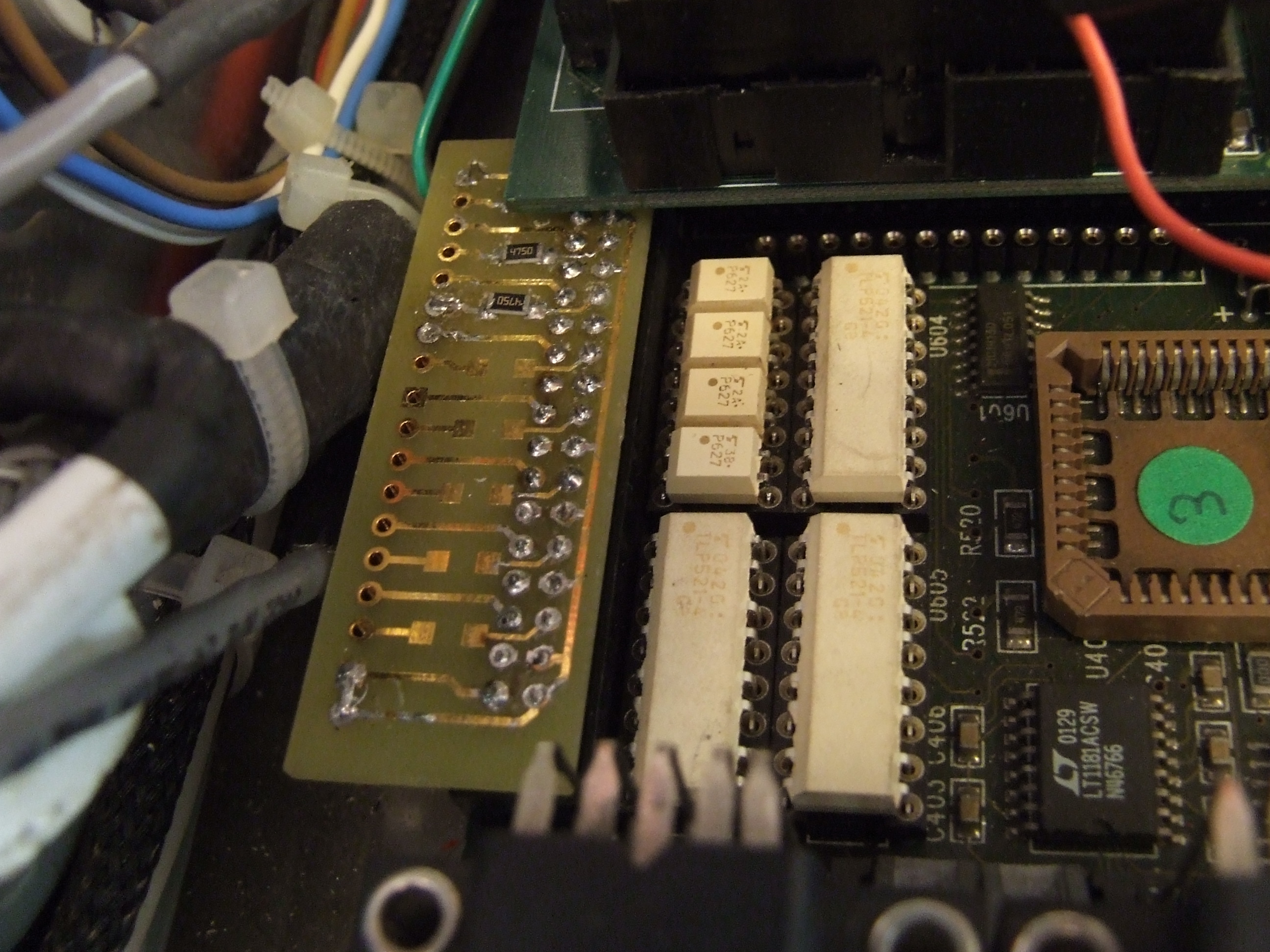
- Schema du cablage du joystick 2 axes sur la carte MPC555 :
- Photos relatives au cablage du joystick 2 axes sur le Cycab :
Télémètre à balayage laser
Telemetre SICK
Telemetre IBEO Ladar
Capteur GPS
GPS centimétrique RTK
Camera
Camera monostereo EVT Marlin (firewire IEEE 1394)
Camera stereo SVS Videre Design (firewire IEEE 1394)
Camera stereo Tyzx DeepSea
Capteur de mouvement
Capteur Xsens MTI-G
Architecture Bas-Niveau
Schémas et modèles géométriques fournis par le constructeur Robosoft
Schémas fournis par Robosoft- Modèles géométriques servant pour la conduite en mode simple (ie mode voiture) ou dual pour la train de direction :
- Schémas de câblages :
Schema général de l'architecture (hard) du Cycab :
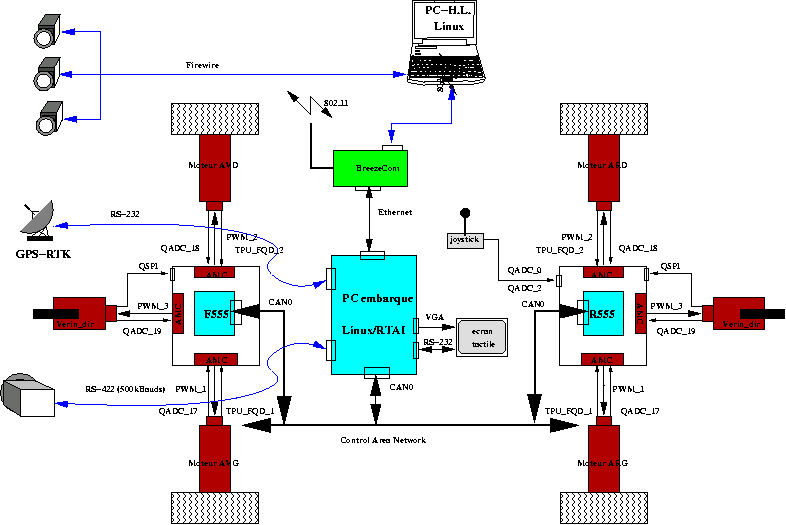
- Légendes
PWMPulse Width Modulation QADCQueued Analog-to-Digital Converter QSPIQueued Serial Peripheral Interface TPUTime Processor Unit - Fichier eps
Batteries
- Depuis mars 2005, batteries utilisées : Tudor TD 60
- Precedemment, entre 2000 et mai 2005, batteries utilisées : Steco Granit 600
Montages
- Cablage d'un variateur curtis
- Montage des platines support de capteurs : montage support
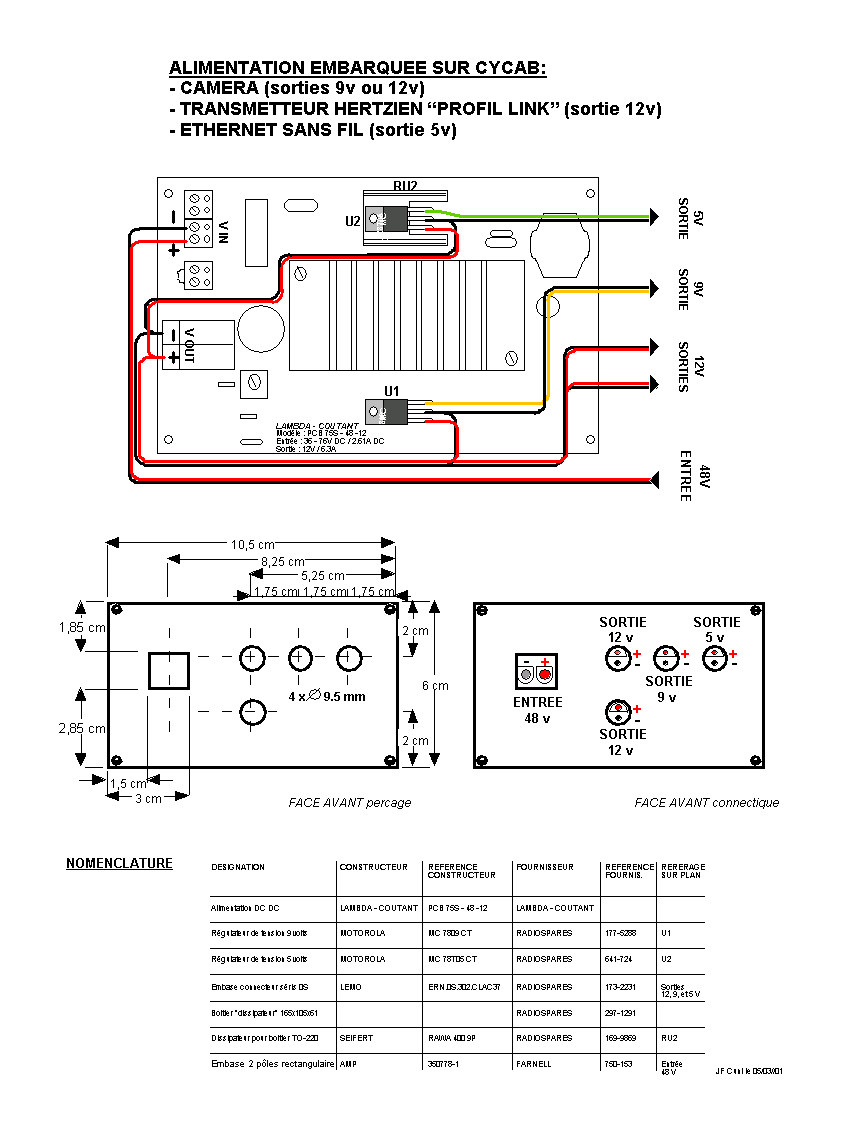
- Installation d'une alimentation 12, 9 et 5 Volts au plafond : alim
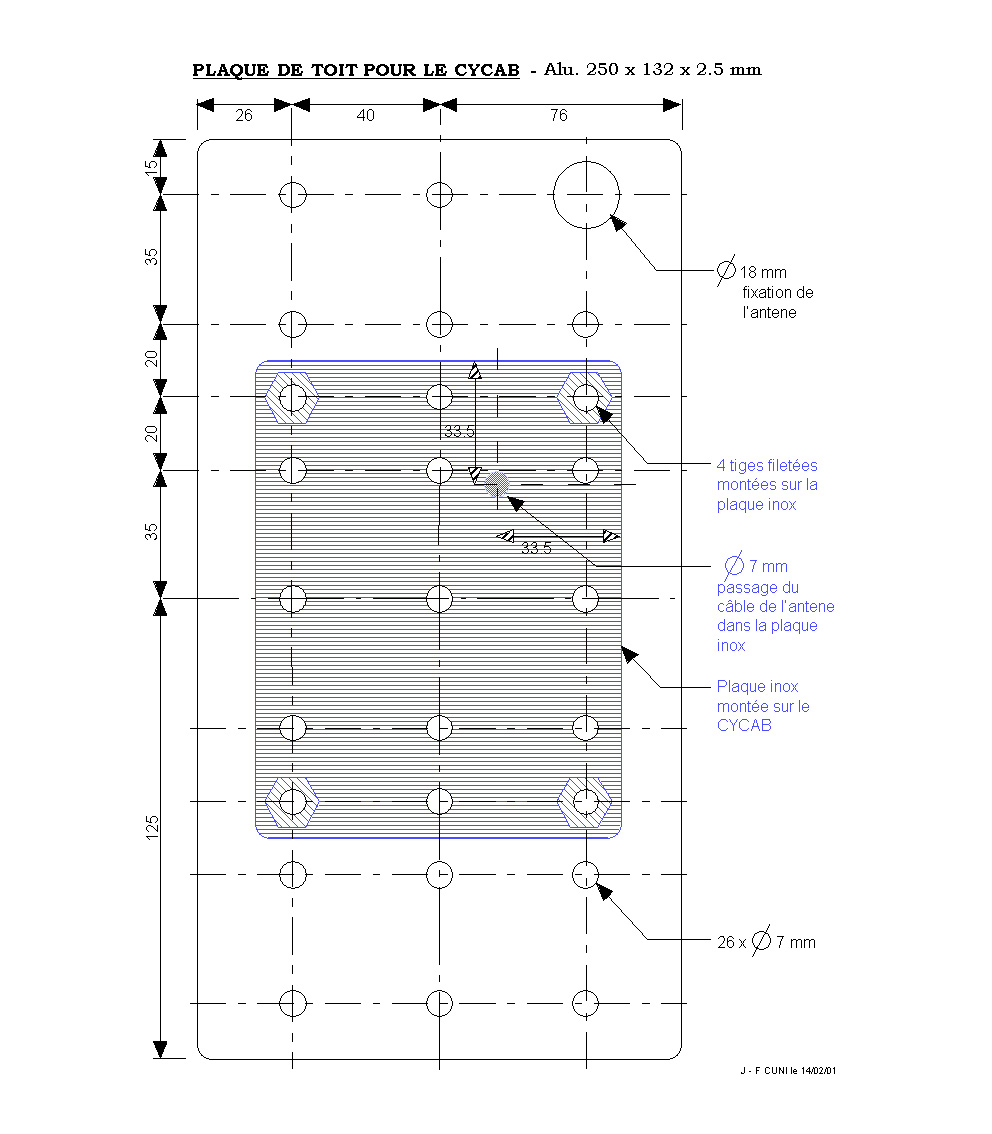
- Plan de réalisation de la platine de toit : plan platine
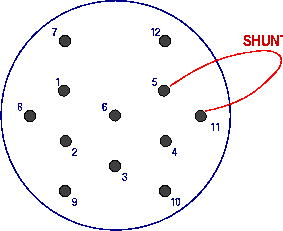
- Cablage pour le Shunt de l'arret d'urgence : shunt du Cycab
- Cablage du nouveau joystick 2 axes + switch HFX-22S12-034 de marque CHProducts : cablage
- Cablage d'un JTAG pour flasher une image sur un chip
- Câble pour liaison RS422 entre le Sick et la carte Quatech du PC embarqué : RS422


| I | Attachment | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|
| |
modelGeometricCycabDual.pdf | manage | 540 K | 10 Apr 2013 - 12:50 | SorayaArias | Modele geometrique pour la conduite en mode dual pour le train de direction |
| |
modelGeometricCycabSingle.pdf | manage | 533 K | 10 Apr 2013 - 12:50 | SorayaArias | Modele geometrique pour la conduite en mode voiture pour le train de direction |
| |
schemaCablageRobosoft.pdf | manage | 7 MB | 10 Apr 2013 - 12:43 | SorayaArias | Schemas de cablages életrique du Cycab fourni par Robosoft |
| |
schemaMotherBoardDetailRobosoft.pdf | manage | 1 MB | 10 Apr 2013 - 12:43 | SorayaArias | Schemas electroniques sur la carte mere et fille pour le MPC555 fournis par Robosoft |
| |
schemaMotherBoardGeneralRobosoft.pdf | manage | 2 MB | 10 Apr 2013 - 12:44 | SorayaArias | Schemas de vue general sur la carte mere et fille pour le MPC555 fournis par Robosoft |
| |
schemaMotorEncoderRobosoft.pdf | manage | 314 K | 10 Apr 2013 - 14:25 | SorayaArias | Schemas electroniques concernant le variateur PWM + encodeurs fournis par Robosoft |
Edit | Attach | Print version | History: r44 < r43 < r42 < r41 | Backlinks | View wiki text | Edit wiki text | More topic actions
Topic revision: r44 - 31 Jul 2013, SorayaArias


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Ideas, requests, problems regarding SedWiki? Send feedback