 |
|
You are here: SedWiki>Platforms/Misc Web>OrccadHome>SafenecsT1 (06 May 2010, SorayaArias)Edit Attach
Tache Robot pour CAR10
- Nom Tache Robot :
X4_Diags_T1
- Module Ressource Physique Robot
Nom Ressource Physique Robot Input Driver Port Output Driver Port Event 
X4_GPS_PhRVItype double[4]AccOtype double[3]- X4_GPS_PhRVItype double[4]Vmot0type double[4]- X4_GPS_PhRVItype double[4]Mag0type double[3]- X4_GPS_PhRVItype double[4]Gyro0type double[3]- X4_GPS_PhRVItype double[4]US0type double[6]- X4_GPS_PhRVItype double[4]Pression0type double- X4_GPS_PhRVItype double[4]GPS0type double[3]- X4_GPS_PhRVItype double[4]Vrel0type double[3]-
- Module Algo
- Contraintes Temporelles
Nom Contrainte Temporelles Modules impliquees Periode (second) Link Synchro Type Priorite X4_Diags_T1_0GPS_CtrlT10.005 CLOCKSOURCEPERIODIC 35 X4_Diags_T1_1AbsPosGPS0.005 CLOCKSOURCEPERIODIC 25 X4_Diags_T1_2QuaternionT10.005 CLOCKSOURCEPERIODIC 10 X4_Diags_T1_3Gen_Traj0.005 CLOCKSOURCEPERIODIC 7 X4_Diags_T1_4Scheduler0.005 CLOCKSOURCEPERIODIC 5 X4_Diags_T1_5Diag_CapteursT10.005 CLOCKSOURCEPERIODIC 4 X4_Diags_T1_6Diag_MoteursT10.005 CLOCKSOURCEPERIODIC 3 X4_Diags_T1_7Disturbance0.005 CLOCKSOURCEPERIODIC 2
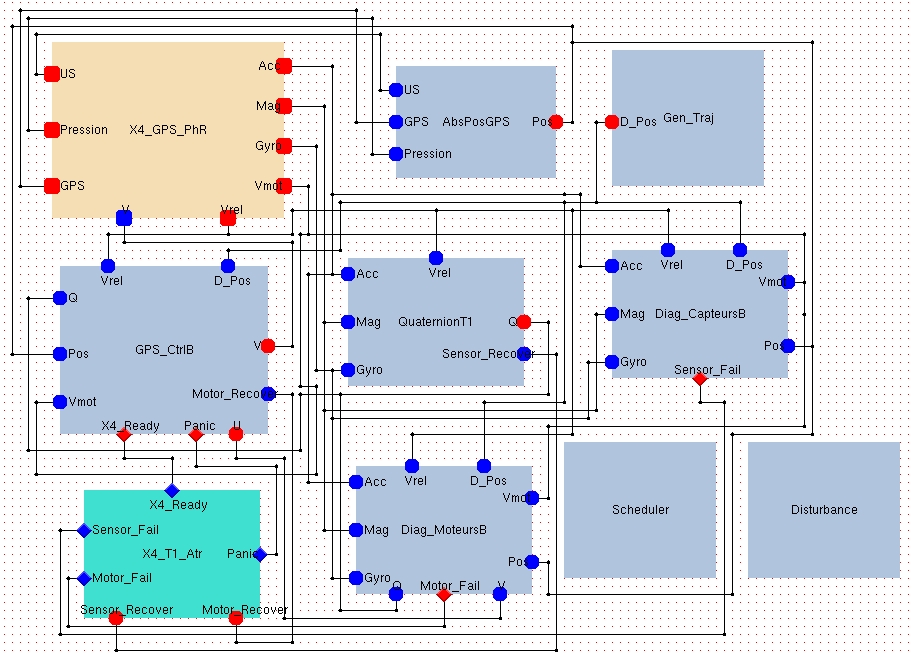
- Schema de la tache Robot sous Orccad V3:


| I | Attachment | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|
| |
X4_Diags_T1.jpg | manage | 533 K | 05 May 2010 - 14:22 | SorayaArias | Schema de la tache Robot sous Orccad V3 |
Edit | Attach | Print version | History: r5 < r4 < r3 < r2 | Backlinks | View wiki text | Edit wiki text | More topic actions
Topic revision: r5 - 06 May 2010, SorayaArias


{kind=link}
Ideas, requests, problems regarding SedWiki? Send feedback