 |
|
You are here: SedWiki>Platforms/Misc Web>PlatformsObsolete>CyCabRobot>DemarrageCycabOld (31 Jul 2013, SorayaArias)Edit Attach
Mise en route du Cycab
- Démarrer le Cycab
- Lancer la conduite au Joystick
- Arrêter/Eteindre le Cycab
- Localisation dans le plan du Cycab
Comment démarrer le Cycab
- Mettre le Cycab sous tension par le coupe batterie, le bouton d'arrêt d'urgence étant enfoncé (seul le PC embarqué est sous tension)
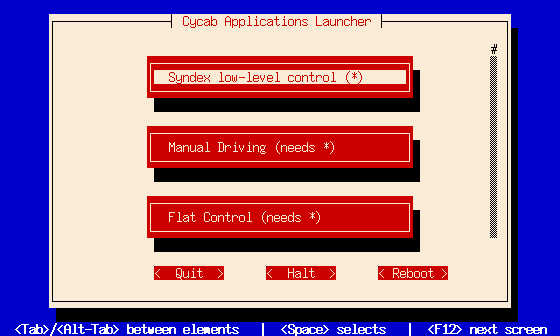
- L'IHM ci-dessous, développée par Cédric Pradalier doit apparaître sur l'écran.
- Mettre les noeuds sous tension en libérant l'arrêt d'urgence
- Valider le menu Syndex Low Level Control (avec la touche Enter)
- Un sous-menu apparaît, sélectionner Start et valider : ceci a pour effet de lancer le chargement des noeuds 555 avec le code Syndex (équivalent de la commande make dans le répertoire Syndex/ManDriving).Si tout s'est bien passé, on doit voir apparaître sur l'écran :
Download complete .... application is running
Si les noeuds se sont mal initialisés (certaines cartes peuvent avoir des problèmes de Reset), il faut procéder de la manière suivante :- sélectionner le sous-menu Stop (équivalent de la commade make-stop),
- re-initialiser les noeuds en coupant leur alimentation (arrêt d'urgence),
- attendre la commutation du relai des freins (déclic audible),
- recommencer la procédure de mise en route en 1. Attention : 2 actions sur le bouton Start du menu sans Stop entre les deux provoquent un plantage des noeuds. Il faut alors sortir par Ctrl C pour se retrouver sous le menu Syndex , faire Stop et recommencer la procédure en 1.
- Après le chargement correct des noeuds quitter le menu Syndex Low Level (en utilisant le bouton Quit)
Comment lancer l'application de conduite au joystick
- Pré-requis : l'étape "Comment démarrer le Cycab"
- Sélectionner le menu Manual Driving : un Warning rappelant que pour lancer cette application il est nécessaire que le controle bas niveau Synex tourne. Valider.
- Dans le sous-menu "Manual Driving API C", entre les boutons, le texte suivant apparaît en bleu :
Calibration needed Cycab state : can't to allow driving
pour rappeler qu'avant toute utilisation, il est nécessaire de calibrer le joystick : sélectionner le menu Calibrate Joystick et suivre les instructions données :- acquisition de la zone neutre : attendre 5 secondes, puis Ok pour valider
- Ok avant de commencer la détermination de la plage de variation du joystick : on dispose alors de 10 secondes pour acquérir les positions extrêmes en faisant un mouvement circulaire d'amplitude maximale avec le joystick.
- attendre le message :
Calibration succeeded - Ok pour valider : vérifier que les valeurs affichées sont correctes : pas trop d'amplitude pour la plage neutre qui doit d'autre part être à peu près centrée.
- Enter pour revenir au sous-menu précédent, le message affiché entre les boutons doit être :
Calibration done Cycab state : driving allowed
- Sélectionner Start Driving, le Cycab est maintenant prêt à être conduit à l'aide du Joystick.
Comment arrêter/ éteindre le Cycab
- Pré-requis: l'étape "Comment démarrer le Cycab"
- Sélectionner le menu Syndex Low Level
- Sélectionner ensuite le bouton Stop. Il faut entendre un "clic" qui indique que les relais des freins ont bien été activés et les modules RTAI sont désinstallés.
- Enclencher le bouton d'arrêt d'urgence
- Sortir du menu Syndex Low Level et sélectionner le bouton Halt (utiliser la touche tabulation du clavier). Le PC embarqué lance sa procédure d'arrêt de système.
- Attendre que le message "Power down" apparaisse à l'écran et désarmer le coupe batterie
- Le PC et le Cycab sont arrêtés !
Positionnement du Cycab dans le plan
L'objectif est de pouvoir localiser le Cycab dans le plan grâce au laser Sick et à 2 points de référence du parking. La procédure pour activer ce mode :- Pré-requis: l'étape "Comment démarrer le Cycab"
- Positionner au minimum 3 balises réflechissantes, donc deux sur les points de référence du parking. Certaines zones sont repérées dans la halle robotique simulant soit 2 plots présents devant la halle, soit le trottoir du côté droit de la halle.
- Sélectionner le menu Server Cycab+Sick+SLAM+Map : un Warning rappelant que pour lancer cette application il est nécessaire que le controle bas niveau Synex tourne. Valider.
- Lancer sur un poste l'utilitaire EtherSickTest (présent dans un répertoire du type : CycabDevpt/src/EtherCycabGLS/, sources à récupérer dans CVS). Cet utilitaire va retourner les bornes detectées par le Sick. Il faut noter quelles sont les 2 valeurs représentant les bornes de référence. Par exemple : A CONTINUER
- Sur le Cycab, changer de session via Alt+F2. Vous identifier avec votre compte. Puis modifier le fichier /usr/local/etc/associationData.txt. Il faut indiquer dans ce fichier l'indice de chaque borne de référence. ATTENTION : la numérotation démarre à 0 et le Sick balaye de droite à gauche.
- Quitter puis revenir dans le menu : Server Cycab+Sick+SLAM+Map. Les premières traces affichent les coordonnées des bornes de référence ainsi que leur indice.
- Faire Begin Localization, puis au bout de quelques secondes, End Localization.


| I | Attachment | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|
| |
StarterScreen.png | manage | 2 K | 22 Jul 2004 - 11:50 | SorayaArias | Menu Starter pour le Cycab |
Edit | Attach | Print version | History: r17 < r16 < r15 < r14 | Backlinks | View wiki text | Edit wiki text | More topic actions
Topic revision: r17 - 31 Jul 2013, SorayaArias


{kind=link}
{kind=link}
Ideas, requests, problems regarding SedWiki? Send feedback