 |
|
You are here: SedWiki>Platforms/Misc Web>BipedeRobot>BipArchives>HistoryBip>BipVersion1Marche (17 Jul 2007, SorayaArias)Edit Attach
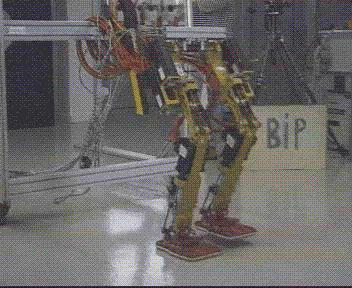
La version "plan" à huit degrés de liberté: Premiers pas
Le robot est maintenu par un portique qui lui laisse 3 degrés de liberté d'évolution sur le plan vertical. Le robot suit des trajectoires articulaires de marche qui lui assure une stabilité statique. Ces trajectoires sont calculées hors-ligne et le robot suit ces trajectoires articulaires par un PD avec compensation de gravité. * La première marche plan-- RogerPissard - 04 Jun 2003


| I | Attachment | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|
| |
8_Axes.mpg | manage | 9 MB | 04 Jun 2003 - 16:28 | RogerPissard | La première marche "plan" |
| |
bip01.jpg | manage | 28 K | 04 Jun 2003 - 16:28 | RogerPissard | Le robot Bip 8 ddl |
Edit | Attach | Print version | History: r2 < r1 | Backlinks | View wiki text | Edit wiki text | More topic actions
Topic revision: r2 - 17 Jul 2007, SorayaArias


{kind=link}
{kind=link}
Ideas, requests, problems regarding SedWiki? Send feedback