 |
|
Rapport RT-0243 : Mise à jour de l'armoire de commande du robot Bipède
Le robot Bipède tel qu'il avait été défini en 2000 a montré ses limites en termes de capacité de traitement et de prise en compte de nouveaux capteurs.
Cette page décrit les modifications apportées et constitue une mise à jour du rapport technique RT-0243 décrivant l'armoire de commande du robot bipède.
Modifications du hardware
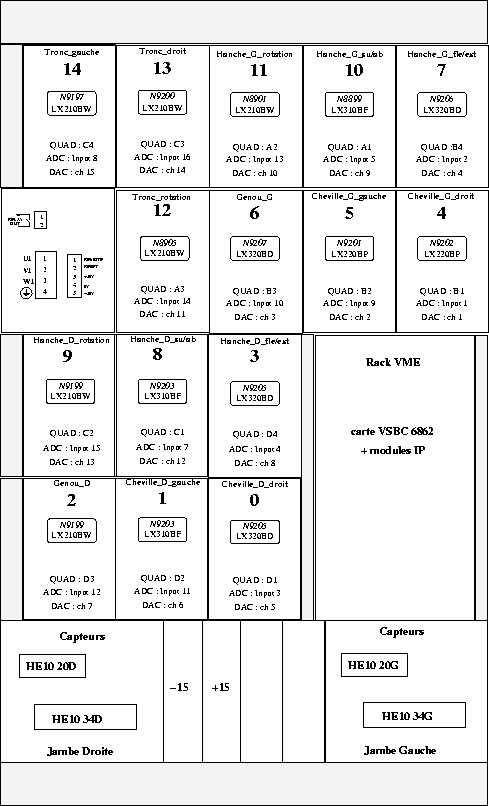
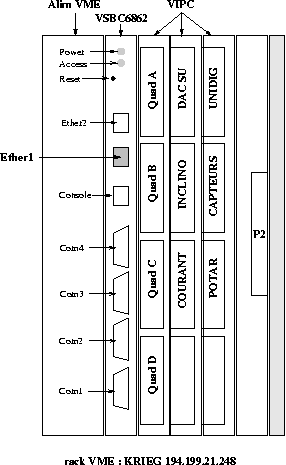
Ces modifications concernent l'armoire de commande. La partie puissance (1 ABS et 15 SBS Parvex) reste inchangée, les tableaux XXX montre le câblage. Seuls le rack VME et la partie basse de la baie (câblage des capteurs) ont été modifiés. La figure baie montre l'implantation de tous les éléments de la baie.
Le rack VME
Nous avons choisi de garder le rack VME avec une carte de fond de panier 6 slots. La carte processeur a été changée pour augmenter la puissance et la vitesse de traitement en local et pour décupler la vitesse de transmission sur le réseau Ethernet, ce qui permet de déporter les gros calculs. Pour interfacer les nouveaux capteurs implantés sur le robot, une troisième carte VIPC support de modules IP a été rajoutée, et un connecteur DIN41612 96 contacts a été monté en partie gauche en lieu et place de la carte sécurité qui reste à faire. Le schéma montre la partie rack VME de la baie avec les connecteurs disponibles en face avant.
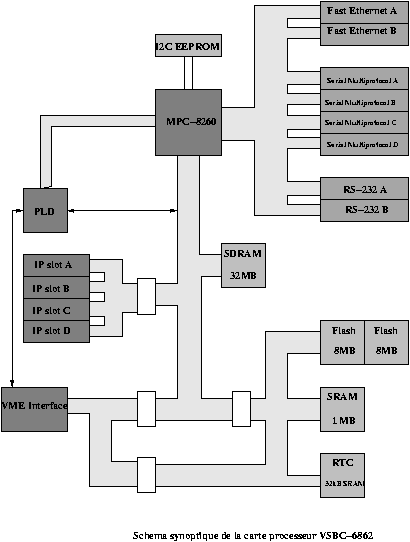
La carte processeur VSBC6862
Un changement majeur par rapport à la version 2000 a été le remplacement de la carte processeur MVME162 architecturée autour d'un microprocesseur MC68040 cadencé à 32 MHz par une carte VSBC6862 architecturée autour d'un micro-contrôleur Motorola PowerQUICC II (VSBC).
Les principales caractéristiques de la carte VSBC6862 sont:
- un coeur 32 bits EC603 cadencé à 200 MHz pour 280,0 MIPS (Drhystone 2.1),
- un processeur RISC 32 bits dédié aux protocoles de communication, 32 MBytes de DRAM avec bus de données de 64 bits et en double accès avec le bus VME,
- 16 MBytes de mémoire Flash avec bus de données de 64 bits divisée en 2 bancs "bootables" dont l'un est en double accès avec le bus VME,
- 1 MByte de SRAM en double accès avec le bus VME pour les informations non-volatiles,
- un dispositif horloge temps réel avec 32 KBytes de SRAM secourue,
- une EEPROM I²C pour la configuration de la carte,
- 2 interfaces Fast Ethernet 100Base-TX/10Base-T avec auto-négociation,
- 4 ports série multi-protocole (RS-232, RS-422, RS485 ouV.35),
- 2 ports série RS-232, un bus I²C pour des extensions locales,
- un port JTAG pour le déverminage,
- un contrôleur VME maître ou esclave,
- 4 emplacements pour des modules IP.
Les connecteurs 100Base-TX/10Base-T se trouvent sur le bandeau avant de la carte, nous avons donc supprimé le transceiver Ethernet qui était en partie basse de la baie.
Liens avec les variateurs
- Les modules IP_Quadrature servent à lire les vitesses de rotation des moteurs
- Les consignes en couple pour les moteurs sont générées par le module IP_DAC_SU
- Le module IP_DAC_Courant permet de mesurer les courants (image des couples) dans les moteurs.
| Jambe Droite | |||||||||
| Variateur 0 : Cheville_D_droit | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Bornier Variateur | IP_ADC_courant | IP-DAC | Bornier codeur | IP-Quadrature D1 | |||||
| Borne | Fonction | Broche | Fonction | Broche | Fonction | Borne | Fonction | Broche | Fonction |
| 7 | SPEED EN | 1 | O | 9 | Z1+(vr) | ||||
| 8 | TORQUE EN (bleu) | 2 | O/ | 11 | Z1-(bl) | ||||
| 9 | 0VD (noir) | 3 | A | 1 | X1+(mr) | ||||
| 10 | DRIVE EN (vert) | 4 | A/ | 3 | X1-(rg) | ||||
| 11 | I OUT | 7 | ADC Input3 (jn) | 5 | B | 5 | Y1+(or) | ||
| 12 | I RED | 6 | B/ | 7 | Y1-(jn) | ||||
| 13 | 0VA | 9 | AGND(vr) | 7 | 0V | ||||
| 14 | +REF | 10 | CH5(blanc) | 8 | 5V | ||||
| 15 | -REF | 9 | AGND(vr) | ||||||
| Variateur 1 : Cheville_D_gauche | |||||||||
| Bornier Variateur | IP_ADC_courant | IP-DAC | Bornier codeur | IP-Quadrature D2 | |||||
| Borne | Fonction | Broche | Fonction | Broche | Fonction | Borne | Fonction | Broche | Fonction |
| 7 | SPEED EN | 1 | O | 21 | Z2+(mr) | ||||
| 8 | TORQUE EN (bleu) | 2 | O/ | 23 | Z2-(rg) | ||||
| 9 | 0VD (noir) | 3 | A | 13 | X2+(vl) | ||||
| 10 | DRIVE EN (vert) | 4 | A/ | 15 | X2-(gr) | ||||
| 11 | I OUT | 8 | ADC Input11(blanc) | 5 | B | 17 | Y2+(rs) | ||
| 12 | I RED | 6 | B/ | 19 | Y2-(no) | ||||
| 13 | 0VA | 9 | AGND(vr) | 7 | 0V | ||||
| 14 | +REF | 12 | CH6(blanc) | 8 | 5V | ||||
| 15 | -REF | 11 | AGND(bleu) | ||||||
| Variateur 2 : Genou_D | |||||||||
| Bornier Variateur | IP_ADC_courant | IP-DAC | Bornier codeur | IP-Quadrature D3 | |||||
| Borne | Fonction | Broche | Fonction | Broche | Fonction | Borne | Fonction | Broche | Fonction |
| 7 | SPEED EN | 1 | O | 33 | Z3+(vl) | ||||
| 8 | TORQUE EN (bleu) | 2 | O/ | 35 | Z3-(gr) | ||||
| 9 | 0VD (noir) | 3 | A | 25 | X3+(or) | ||||
| 10 | DRIVE EN (vert) | 4 | A/ | 27 | X3-(jn) | ||||
| 11 | I OUT | 10 | ADC Input12(blanc) | 5 | B | 29 | Y3+(vr) | ||
| 12 | I RED | 6 | B/ | 31 | Y3-(bl) | ||||
| 13 | 0VA | 12 | AGND(blanc) | 7 | 0V | ||||
| 14 | +REF | 14 | CH7(blanc) | 8 | 5V | ||||
| 15 | -REF | 13 | AGND(vl) | ||||||
| Variateur 3 : Hanche_D_fle/ext | |||||||||
| Bornier Variateur | IP_ADC_courant | IP-DAC | Bornier codeur | IP-Quadrature D4 | |||||
| Borne | Fonction | Broche | Fonction | Broche | Fonction | Borne | Fonction | Broche | Fonction |
| 7 | SPEED EN | 1 | O | 45 | Z4+(or) | ||||
| 8 | TORQUE EN (bleu) | 2 | O/ | 47 | Z4-(jn) | ||||
| 9 | 0VD (noir) | 3 | A | 37 | X4+(rs) | ||||
| 10 | DRIVE EN (vert) | 4 | A/ | 39 | X4-(no) | ||||
| 11 | I OUT | 11 | ADC Input4(bl) | 5 | B | 41 | Y4+(mr) | ||
| 12 | I RED | 6 | B/ | 43 | Y4-(rg) | ||||
| 13 | 0VA | 12 | AGND(blanc) | 7 | 0V | ||||
| 14 | +REF | 16 | CH8(blanc) | 8 | 5V | ||||
| 15 | -REF | 15 | AGND(gr) | ||||||
| Jambe Gauche | |||||||||
| Variateur 4 : Cheville_G_droit | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Bornier Variateur | IP_ADC_courant | IP-DAC | Bornier codeur | IP-Quadrature B1 | |||||
| Borne | Fonction | Broche | Fonction | Broche | Fonction | Borne | Fonction | Broche | Fonction |
| 7 | SPEED EN | 1 | O | 9 | Z1+(vr) | ||||
| 8 | TORQUE EN (bleu) | 2 | O/ | 11 | Z1-(bl) | ||||
| 9 | 0VD (noir) | 3 | A | 1 | X1+(mr) | ||||
| 10 | DRIVE EN (vert) | 4 | A/ | 3 | X1-(rg) | ||||
| 11 | I OUT | 1 | ADC Input1(mr) | 5 | B | 5 | Y1+(or) | ||
| 12 | I RED | 6 | B/ | 7 | Y1-(jn) | ||||
| 13 | 0VA | 3 | AGND(rg) | 7 | 0V | ||||
| 14 | +REF | 2 | CH1(blanc) | 8 | 5V | ||||
| 15 | -REF | 1 | AGND(mr) | ||||||
| Variateur 5 : Cheville_G_gauche | |||||||||
| Bornier Variateur | IP_ADC_courant | IP-DAC | Bornier codeur | IP-Quadrature B2 | |||||
| Borne | Fonction | Broche | Fonction | Broche | Fonction | Borne | Fonction | Broche | Fonction |
| 7 | SPEED EN | 1 | O | 21 | Z2+(mr) | ||||
| 8 | TORQUE EN (bleu) | 2 | O/ | 23 | Z2-(rg) | ||||
| 9 | 0VD (noir) | 3 | A | 13 | X2+(vl) | ||||
| 10 | DRIVE EN (vert) | 4 | A/ | 15 | X2-(gr) | ||||
| 11 | I OUT | 2 | ADC Input9(blanc) | 5 | B | 17 | Y2+(rs) | ||
| 12 | I RED | 6 | B/ | 19 | Y2-(no) | ||||
| 13 | 0VA | 3 | AGND(rg) | 7 | 0V | ||||
| 14 | +REF | 4 | CH2(blanc) | 8 | 5V | ||||
| 15 | -REF | 3 | AGND(rg) | ||||||
| Variateur 6 : Genou_G | |||||||||
| Bornier Variateur | IP_ADC_courant | IP-DAC | Bornier codeur | IP-Quadrature B3 | |||||
| Borne | Fonction | Broche | Fonction | Broche | Fonction | Borne | Fonction | Broche | Fonction |
| 7 | SPEED EN | 1 | O | 33 | Z3+(vl) | ||||
| 8 | TORQUE EN (bleu) | 2 | O/ | 35 | Z3-(gr) | ||||
| 9 | 0VD (noir) | 3 | A | 25 | X3+(or) | ||||
| 10 | DRIVE EN (vert) | 4 | A/ | 27 | X3-(jn) | ||||
| 11 | I OUT | 4 | ADC Input10(blanc) | 5 | B | 29 | Y3+(vr) | ||
| 12 | I RED | 6 | B/ | 31 | Y3-(bl) | ||||
| 13 | 0VA | 6 | AGND(blanc) | 7 | 0V | ||||
| 14 | +REF | 6 | CH3(blanc) | 8 | 5V | ||||
| 15 | -REF | 5 | AGND(or) | ||||||
| Variateur 7 : Hanche_G_fle/ext | |||||||||
| Bornier Variateur | IP_ADC_courant | IP-DAC | Bornier codeur | IP-Quadrature B4 | |||||
| Borne | Fonction | Broche | Fonction | Broche | Fonction | Borne | Fonction | Broche | Fonction |
| 7 | SPEED EN | 1 | O | 45 | Z4+(or) | ||||
| 8 | TORQUE EN (bleu) | 2 | O/ | 47 | Z4-(jn) | ||||
| 9 | 0VD (noir) | 3 | A | 37 | X4+(rs) | ||||
| 10 | DRIVE EN (vert) | 4 | A/ | 39 | X4-(no) | ||||
| 11 | I OUT | 5 | ADC Input2(or) | 5 | B | 41 | Y4+(mr) | ||
| 12 | I RED | 6 | B/ | 43 | Y4-(rg) | ||||
| 13 | 0VA | 6 | AGND(blanc) | 7 | 0V | ||||
| 14 | +REF | 8 | CH4(blanc) | 8 | 5V | ||||
| 15 | -REF | 7 | AGND(jn) | ||||||
| Pelvis Droit | |||||||||
| Variateur 8 : Hanche_D_su/ab | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Bornier Variateur | IP_ADC_courant | IP-DAC | Bornier codeur | IP-Quadrature C1 | |||||
| Borne | Fonction | Broche | Fonction | Broche | Fonction | Borne | Fonction | Broche | Fonction |
| 7 | SPEED EN | 1 | O | 9 | Z1+(vr) | ||||
| 8 | TORQUE EN (bleu) | 2 | O/ | 11 | Z1-(bl) | ||||
| 9 | 0VD (noir) | 3 | A | 1 | X1+(mr) | ||||
| 10 | DRIVE EN (vert) | 4 | A/ | 3 | X1-(rg) | ||||
| 11 | I OUT | 19 | ADC Input7(no) | 5 | B | 5 | Y1+(or) | ||
| 12 | I RED | 6 | B/ | 7 | Y1-(jn) | ||||
| 13 | 0VA | 21 | AGND(mr) | 7 | 0V | ||||
| 14 | +REF | 41 | CH12(mr) | 8 | 5V | ||||
| 15 | -REF | 42 | AGND(blanc) | ||||||
| Variateur 9 : Hanche_D_rotation | |||||||||
| Bornier Variateur | IP_ADC_courant | IP-DAC | Bornier codeur | IP-Quadrature C2 | |||||
| Borne | Fonction | Broche | Fonction | Broche | Fonction | Borne | Fonction | Broche | Fonction |
| 7 | SPEED EN | 1 | O | 21 | Z2+(mr) | ||||
| 8 | TORQUE EN (bleu) | 2 | O/ | 23 | Z2-(rg) | ||||
| 9 | 0VD (noir) | 3 | A | 13 | X2+(vl) | ||||
| 10 | DRIVE EN (vert) | 4 | A/ | 15 | X2-(gr) | ||||
| 11 | I OUT | 20 | ADC Input5(blanc) | 5 | B | 17 | Y2+(rs) | ||
| 12 | I RED | 6 | B/ | 19 | Y2-(no) | ||||
| 13 | 0VA | 21 | AGND(mr) | 7 | 0V | ||||
| 14 | +REF | 43 | CH13(rg) | 8 | 5V | ||||
| 15 | -REF | 44 | AGND(blanc) | ||||||
| Variateur 13 : Tronc_Droit | |||||||||
| Bornier Variateur | IP_ADC_courant | IP-DAC | Bornier codeur | IP-Quadrature C3 | |||||
| Borne | Fonction | Broche | Fonction | Broche | Fonction | Borne | Fonction | Broche | Fonction |
| 7 | SPEED EN | 1 | O | 33 | Z3+(vl) | ||||
| 8 | TORQUE EN (bleu) | 2 | O/ | 35 | Z3-(gr) | ||||
| 9 | 0VD (noir) | 3 | A | 25 | X3+(or) | ||||
| 10 | DRIVE EN (vert) | 4 | A/ | 27 | X3-(jn) | ||||
| 11 | I OUT | 22 | ADC Input16(blanc) | 5 | B | 29 | Y3+(vr) | ||
| 12 | I RED | 6 | B/ | 31 | Y3-(bl) | ||||
| 13 | 0VA | 24 | AGND(blanc) | 7 | 0V | ||||
| 14 | +REF | 45 | CH14(or) | 8 | 5V | ||||
| 15 | -REF | 46 | AGND(blanc) | ||||||
| Variateur 14 : Tronc_gauche | |||||||||
| Bornier Variateur | IP_ADC_courant | IP-DAC | Bornier codeur | IP-Quadrature C4 | |||||
| Borne | Fonction | Broche | Fonction | Broche | Fonction | Borne | Fonction | Broche | Fonction |
| 7 | SPEED EN | 1 | O | 45 | Z4+(or) | ||||
| 8 | TORQUE EN (bleu) | 2 | O/ | 47 | Z4-(jn) | ||||
| 9 | 0VD (noir) | 3 | A | 37 | X4+(rs) | ||||
| 10 | DRIVE EN (vert) | 4 | A/ | 39 | X4-(no) | ||||
| 11 | I OUT | 23 | ADC Input8(rg) | 5 | B | 41 | Y4+(mr) | ||
| 12 | I RED | 6 | B/ | 43 | Y4-(rg) | ||||
| 13 | 0VA | 24 | AGND(blanc) | 7 | 0V | ||||
| 14 | +REF | 47 | CH15(jn) | 8 | 5V | ||||
| 15 | -REF | 48 | AGND(blanc) | ||||||
| Pelvis Gauche | |||||||||
| Variateur 10 : Hanche_G_su/ab | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Bornier Variateur | IP_ADC_courant | IP-DAC | Bornier codeur | IP-Quadrature A1 | |||||
| Borne | Fonction | Broche | Fonction | Broche | Fonction | Borne | Fonction | Broche | Fonction |
| 7 | SPEED EN | 1 | O | 9 | Z1+(vr) | ||||
| 8 | TORQUE EN (bleu) | 2 | O/ | 11 | Z1-(bl) | ||||
| 9 | 0VD (noir) | 3 | A | 1 | X1+(mr) | ||||
| 10 | DRIVE EN (vert) | 4 | A/ | 3 | X1-(rg) | ||||
| 11 | I OUT | 13 | ADC Input5(vl) | 5 | B | 5 | Y1+(or) | ||
| 12 | I RED | 6 | B/ | 7 | Y1-(jn) | ||||
| 13 | 0VA | 15 | AGND(gr) | 7 | 0V | ||||
| 14 | +REF | 35 | CH9(gr) | 8 | 5V | ||||
| 15 | -REF | 36 | AGND(blanc) | ||||||
| Variateur 11 : Hanche_G_rotation | |||||||||
| Bornier Variateur | IP_ADC_courant | IP-DAC | Bornier codeur | IP-Quadrature A2 | |||||
| Borne | Fonction | Broche | Fonction | Broche | Fonction | Borne | Fonction | Broche | Fonction |
| 7 | SPEED EN | 1 | O | 21 | Z2+(mr) | ||||
| 8 | TORQUE EN (bleu) | 2 | O/ | 23 | Z2-(rg) | ||||
| 9 | 0VD (noir) | 3 | A | 13 | X2+(vl) | ||||
| 10 | DRIVE EN (vert) | 4 | A/ | 15 | X2-(gr) | ||||
| 11 | I OUT | 14 | ADC Input13(blanc) | 5 | B | 17 | Y2+(rs) | ||
| 12 | I RED | 6 | B/ | 19 | Y2-(no) | ||||
| 13 | 0VA | 15 | AGND(gr) | 7 | 0V | ||||
| 14 | +REF | 37 | CH10(rs) | 8 | 5V | ||||
| 15 | -REF | 38 | AGND(blanc) | ||||||
| Variateur 12 : Tronc_Rotation | |||||||||
| Bornier Variateur | IP_ADC_courant | IP-DAC | Bornier codeur | IP-Quadrature A3 | |||||
| Borne | Fonction | Broche | Fonction | Broche | Fonction | Borne | Fonction | Broche | Fonction |
| 7 | SPEED EN | 1 | O | 33 | Z3+(vl) | ||||
| 8 | TORQUE EN (bleu) | 2 | O/ | 35 | Z3-(gr) | ||||
| 9 | 0VD (noir) | 3 | A | 25 | X3+(or) | ||||
| 10 | DRIVE EN (vert) | 4 | A/ | 27 | X3-(jn) | ||||
| 11 | I OUT | 16 | ADC Input14(blanc) | 5 | B | 29 | Y3+(vr) | ||
| 12 | I RED | 6 | B/ | 31 | Y3-(bl) | ||||
| 13 | 0VA | 18 | AGND(blanc) | 7 | 0V | ||||
| 14 | +REF | 39 | CH11(no) | 8 | 5V | ||||
| 15 | -REF | 40 | AGND(blanc) | ||||||
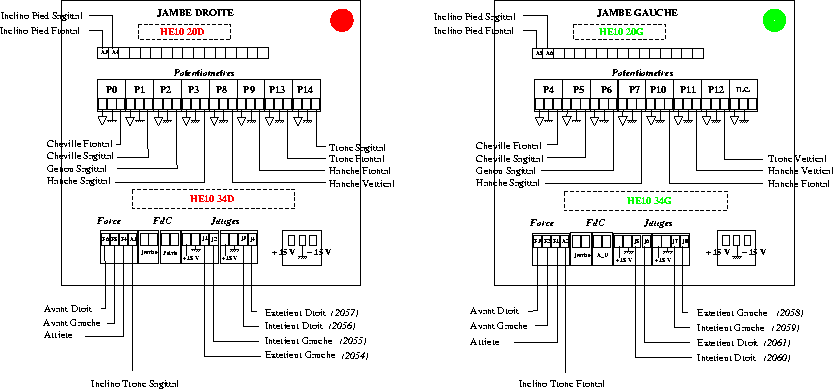
Liens avec les capteurs
Les capteurs utilisés sur le Robot fournissent des valeurs analogiques qu'il est nécessaire de convertir afin qu'elles soient utilisables par les calculateurs embarqués et déportés.
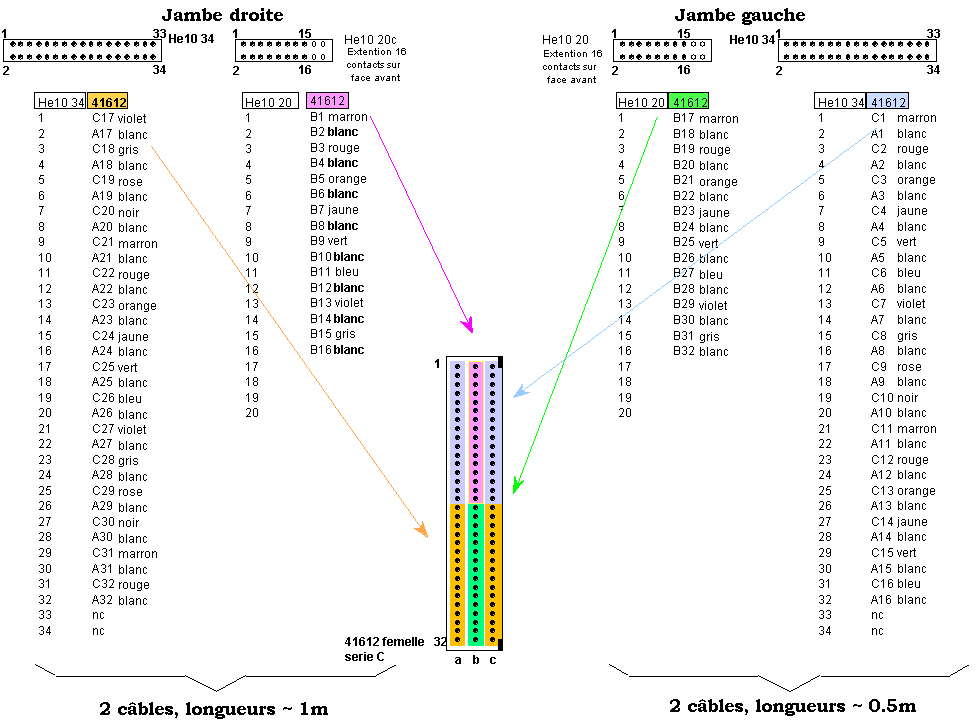
Les informations analogiques remontent sur les borniers situés en partie basse de la baie de commande, transitent par des nappes à l'intérieur de la baie jusqu'au connecteur P2 (DIN6142 à 96 contacts) situé en partie droite du rack VME.
Ces signaux sont repris sur ce connecteur pour être distribués sur 3 modules IP_ADC :
- les potentiomètres associés à chaque axe de rotation sur le module IP_POTAR
- les capteurs d'effort placés sous les pieds du robot et les jauges de contrainte montées sur les biellettes des chevilles sur le module IP_CAPTEURS
- les inclinomètres montés sur les pieds et sur le tronc sur le module IP_INCLINO.
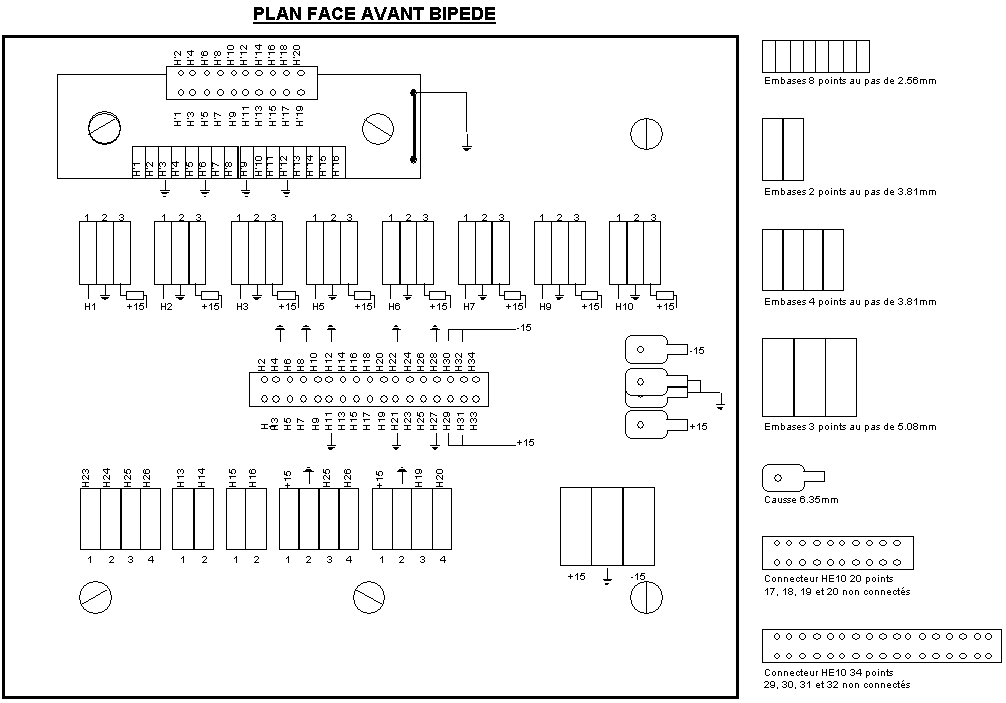
Le rajout des jauges de contraintes et des inclinomètres nous ont obligé à ajouter un IP_ADC supplémentaire et à modifier :
- les faces avant sur lesquelles sont remontées les informations capteurs (rajout d'un bornier 16 contacts par face)
- les nappes à l'intérieur de la baie et le connecteurs de reprise (P2).
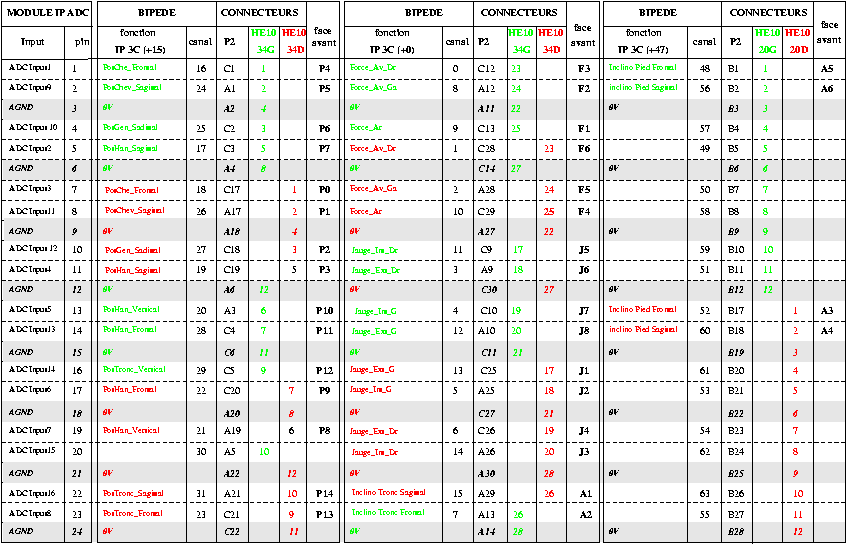
Le tableau ADC montre le câblage entre les borniers capteurs, le connecteur P2 et les modules IP_ADC sur la face avant de la baie.
Le schéma Borniers indique la position sur les borniers des signaux analogiques en provenance des capteurs.
Le schéma nappe est un schéma de réalisation des nappes de fils entre les borniers et le connecteur DIN41612 96 points.
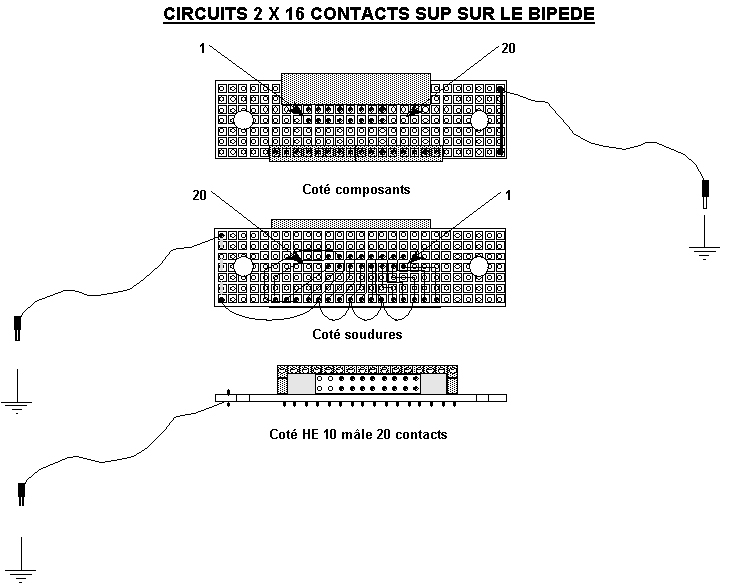
Le schéma HE10_20pts montre la réalisation de la verrue rajoutée sur les 2 faces avant pour la prise en compte de nouveaux capteurs.
Le schéma Face_AV donne l'implantation des borniers et des connecteurs HE10 34 et 20 points sur ces faces avant.
Annexes
- ADC :
Module IP_ADC BIPEDE CONNECTEURS Face Avant BIPEDE CONNECTEURS Face Avant BIPEDE CONNECTEURS Face Avant Input Pin Fonction
IP 3C(+15)Canal P2 HE10
34GHE10
34DFonction
IP 3C(+0)Canal P2 HE10*
*34GHE10*
*34DFonction
IP 3C(+47)Canal P2 HE10
20GHE10
20DADCInput1 1 Pot_Che_Frontal 16 C1 1 P4 Force_Av_Dr 0 C12 23 F3 Inclino Pied Frontal 48 B1 1 A5 ADCInput9 2 Pot_Chev_Sagittal 24 A1 2 P5 Force_Av_Ga 8 A12 24 F2 Inclino Pied Sagittal 56 B2 2 A6 AGND 3 0V A2 4 0V A11 22 0V B3 3 ADCInput10 4 Pot_Gen_Sagittal 25 C2 3 P6 Force_Ar 9 C13 25 F1 57 B4 4 ADCInput2 5 Pot_Han_Sagittal 17 C3 5 P7 Force_Av_Dr 1 C28 23 F6 49 B5 5 AGND 6 0V A4 8 0V C14 27 0V B6 6 ADCInput3 7 Pot_Che_Frontal 18 C17 1 P0 Force_Av_Ga 2 A28 24 F5 50 B7 7 ADCInput11 8 Pot_Chev_Sagittal 26 A17 2 P1 Force_Ar 10 C29 25 F4 58 B8 8 AGND 9 0V A18 4 0V A27 22 0V B9 9 ADCInput12 10 Pot_Gen_Sagittal 27 C18 3 P2 Jauge_Int_Dr 11 C9 17 J5 59 B10 10 ADCInput4 11 Pot_Han_Sagittal 19 C19 5 P3 Jauge_Ext_Dr 3 A9 18 J6 51 B11 11 AGND 12 0V A6 12 0V C30 27 0V B12 12 ADCInput5 13 Pot_Han_Vertical 20 A3 6 P10 Jauge_Int_Ga 4 C10 19 J7 Inclino Pied Frontal 52 B17 1 A3 ADCInput13 14 Pot_Han_Frontal 28 C4 7 P11 Jauge_Ext_Ga 12 A10 20 J8 Inclino Pied Sagittal 60 B18 2 A4 AGND 15 0V C6 11 0V C11 21 0V B19 3 ADCInput14 16 Pot_Tronc_Vertical 29 C5 9 P12 Jauge_Ext_Ga 13 C25 17 J1 61 B20 4 ADCInput6 17 Pot_Tronc_Frontal 22 C20 7 P9 Jauge_Int_Ga 5 A25 18 J2 53 B21 5 AGND 18 0V A20 8 0V C27 21 0V B22 6 ADCInput7 19 Pot_Han_Vertical 21 A19 6 P8 Jauge_Ext_Dr 6 C26 19 J4 54 B23 7 ADCInput15 20 30 A5 10 Jauge_Int_Dr 14 A26 20 J3 62 B24 8 AGND 21 0V A22 12 0V A30 28 0V B25 9 ADCInput16 22 Pot_Tronc_Sagittal 31 A21 10 P14 Inclino Tronc Sagittal 15 A29 26 A1 63 B26 10 ADCInput8 23 Pot_Tronc_Frontal 23 C21 9 P13 Inclino Tronc Frontal 7 A13 26 A2 55 B27 11 AGND 24 0V C22 11 0V A14 28 0V B28 12 - Baie
- Borniers
- Face avant
- HE 10_20 pts
- Nappe
- RackVME
- Synoptique VSBC
 -- GerardBaille - 05 Apr 2004
-- GerardBaille - 05 Apr 2004


| I | Attachment | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|
| |
ADC.png | manage | 24 K | 05 Apr 2004 - 16:36 | SorayaArias | ADC.png |
| |
CI_16EFA.png | manage | 21 K | 05 Apr 2004 - 16:40 | SorayaArias | CI_16EFA.png |
| |
FACE_AV.png | manage | 30 K | 05 Apr 2004 - 16:37 | SorayaArias | FACE_AV.png |
| |
VSBC-6862.png | manage | 6 K | 05 Apr 2004 - 16:37 | SorayaArias | VSBC-6862.png |
| |
addenda_rapport0243.html | manage | 6 K | 05 Apr 2004 - 16:31 | SorayaArias | Addenda 2004 concernant le RT-0243 |
| |
conn_f_AV_vers_fond2panier.png | manage | 108 K | 05 Apr 2004 - 16:37 | SorayaArias | conn_f_AV_vers_fond2panier.png |
| |
face-avant-capteurs.png | manage | 11 K | 05 Apr 2004 - 16:38 | SorayaArias | face-avant-capteurs.png |
| |
implantation.png | manage | 14 K | 05 Apr 2004 - 16:38 | SorayaArias | implantation.png |
| |
rackVME.png | manage | 5 K | 05 Apr 2004 - 16:39 | SorayaArias | rackVME.png |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Ideas, requests, problems regarding SedWiki? Send feedback