 |
|
You are here: SedWiki>Platforms/Misc Web>BipedeRobot>DocBip>BipObsEtat (17 Jul 2007, SorayaArias)Edit Attach
L'observateur de Support.
Introduction
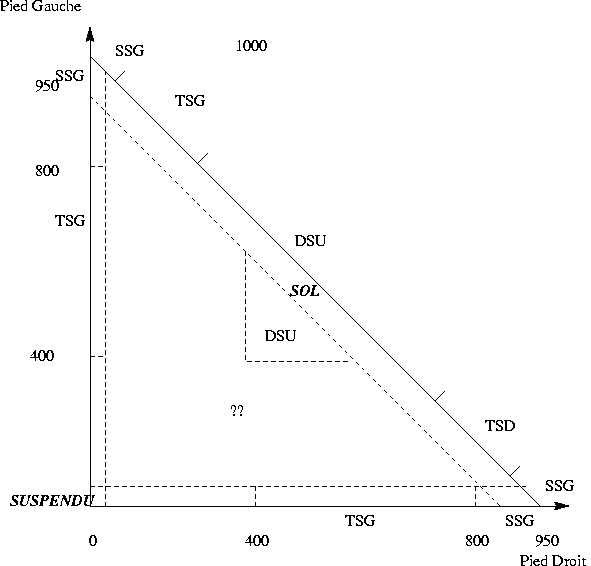
On étend l'observateur de Bip (décrit dans x) qui ne traitait que la phase de transition en l'air vers simple support. Cet observateur étendu est chargé de donner l'état de répartition du poids du robot sur ses pieds (support du robot). Cette observation est basée sur les capteurs de pression dans les chevilles. Il reconstruit l'état- au sol (
SOL) ou suspendu (SUS)- au simple support (pied droit
SSDou pied gaucheSSG) - double support (
DSU)
- au simple support (pied droit
- Transition droite quand le robot a partiellement du poids sur le pied droit (
TSD) - Transition gauche quand le robot a partiellement du poids sur le pied gauche (
TSG) - Transition double support quand le robot au sol a partiellement du poids sur les deux pieds (
TDS)
Algorithme
L'algorithme se divise en trois parties:Calcul état K+1
L'algorithme utilise des seuils pour l'observation :#define supportNO 50 // pas poids du robot 0 + 50 (marge de sécurité) #define supportOK 950 // poids du robot 1050 - 100 (marge de sécurité) #define TransitionSupportOK 800 // poids de transition simple support #define TransitionSupportNO 400 // poids de transition double supportSa description :
SI (Pg+Pd) > 950 => SOL SI Pd >= supportOK => SSD SI Pg >= supportOK => SSG SI (TransitionSupportOK < Pd < supportOK) => TSD SI (TransitionSupportOK < Pg < supportOK) => TSG SINON => DSU SINON => SUS SI (Pd<SupportNO) et (Pg<SupportNO) => AIR SI (Pd>SupportOK) et (Pg<SupportNO) => SSD SI (Pg>SupportOK) et (Pd<SupportNO) => SSG SI (Pd>TransitionSupportNO) et (Pg<SupportNO) => TSD SI (Pg>TransitionSupportNO) et (Pd<SupportNO) => TSG SI (Pd>TransitionSupportNO/2) et (Pg>TransitionSupportNO/2)=>DSU SINON indéterminé, on garde l'état précédant...
Détection d'impact
On garde l'algo décrit par la doc. en surveillant la pente du cumul. des pressionsSynthèse
SI le changement d'état (etat K vers etat K+1) est cohérent avec les impacts => on met à jour l'état. SINON on garde l'état K.-- RogerPissard - 12 Sep 2005
Edit | Attach | Print version | History: r5 < r4 < r3 < r2 | Backlinks | View wiki text | Edit wiki text | More topic actions
Topic revision: r5 - 17 Jul 2007, SorayaArias


Ideas, requests, problems regarding SedWiki? Send feedback