 |
|
You are here: SedWiki>Platforms/Misc/MotionCapture Web>DemarExperiments>DocCouscoussiere (17 Jul 2007, SorayaArias)Edit Attach
Matériel d'acquisition (Version Orthèse et premières manips)
L'orthèse du genou instrumentée (à completer)
- La documentation technique (schémas)
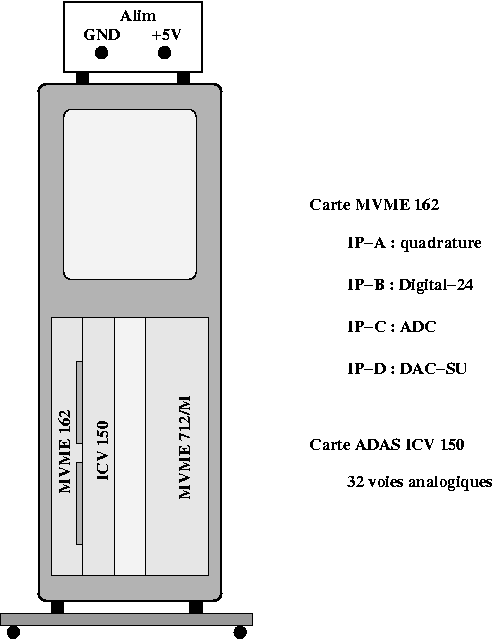
- Le rack d'instrumentation
- La ceinture
- Le câblage
Le système d'acquisition de données "transportable"
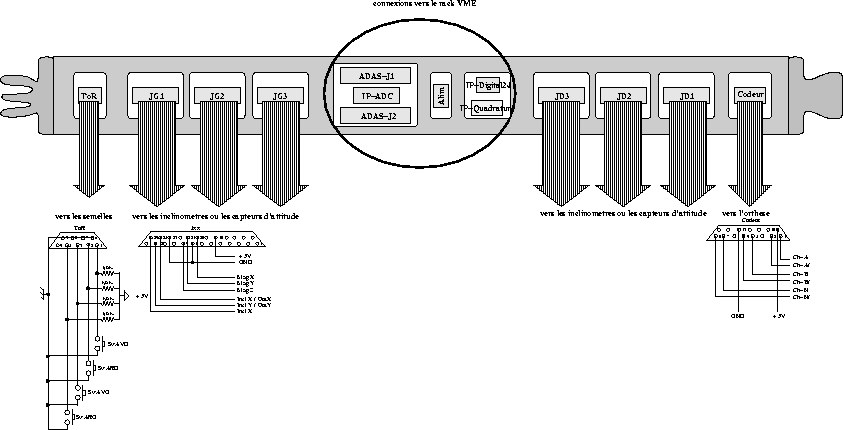
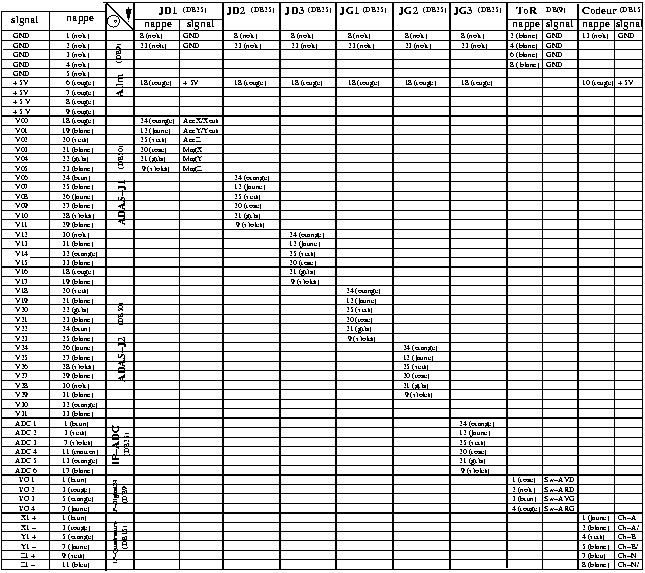
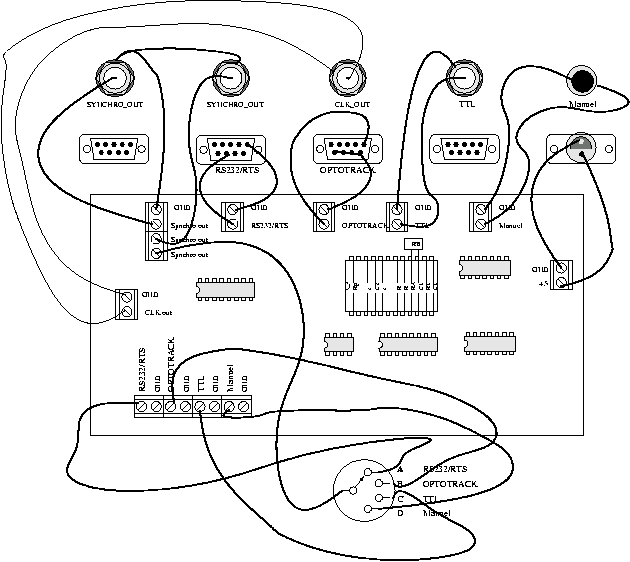
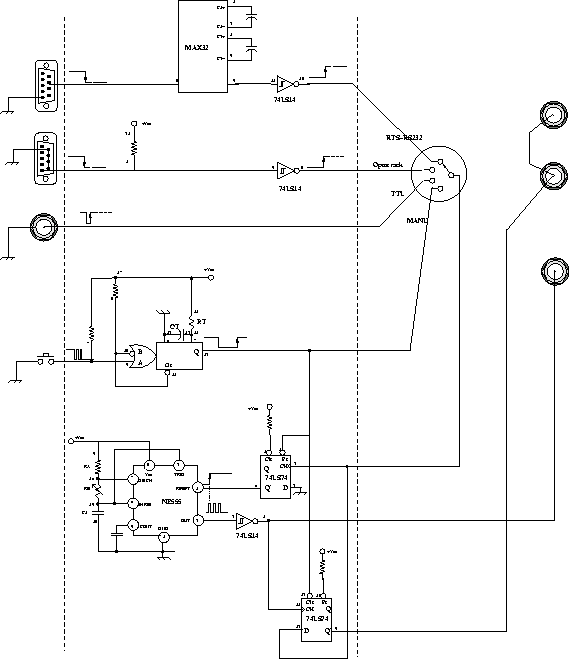
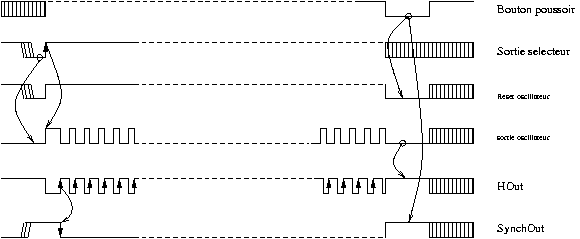
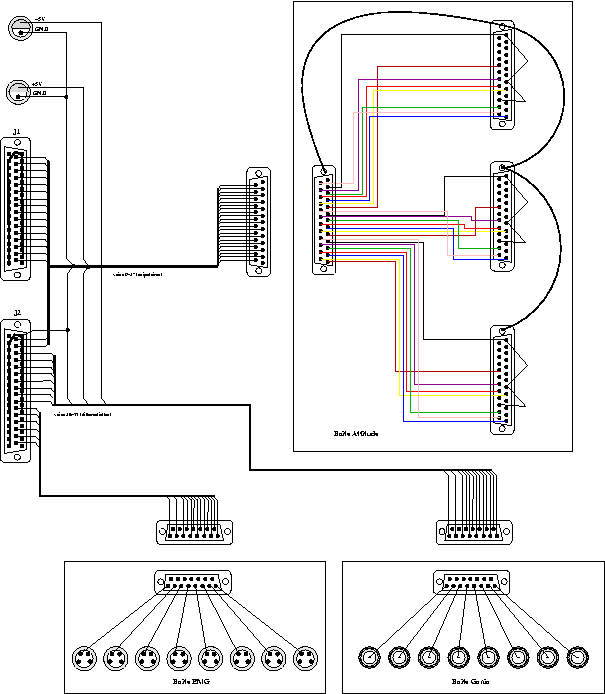
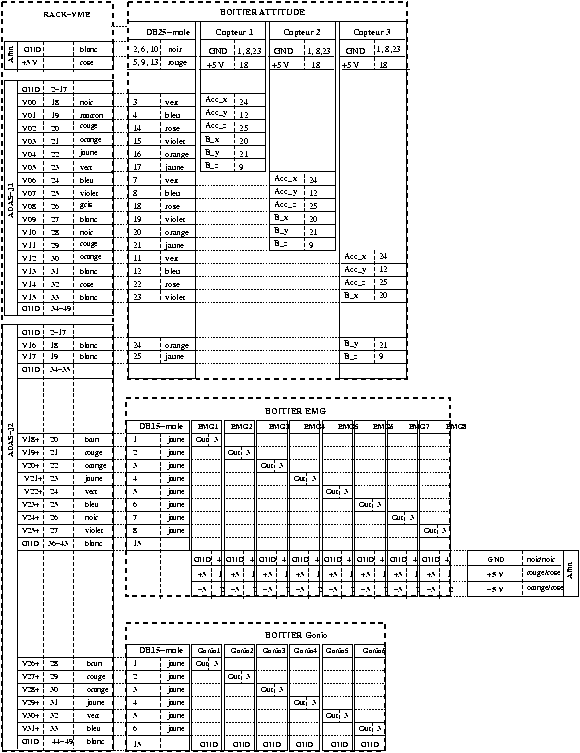
Les expérimentations dans le cadre de DEMAR et de la thèse de Rodolphe se font dans de multiple lieux : Montbonnot, Montpellier, Aalborg (DK), Marseille, en fonction des systèmes d'acquisition à mettre en place et à tester (capteurs d'attitude du CEA, sondes EMG du LIRMM, goniomètres de Aalborg) dont les mesures doivent être synchronisées avec celles des semelles (LIRMM) et éventuellemnt avec celles fournies par un système d'acquisition/reconstruction video (Vicon (Marseille , Montpellier) ou Optotrack (Montbonnot)). Il a donc été décidé de rendre transportable le rack d'instrumentation utilisé pour l'orthèse du genou en minimisant autant que faire se peut le nombre de câbles entre le rack et le sujet support des capteurs. Dans un premier temps, pour les premières expérimentations à Montpellier, les seules acquisitions prévues concernaient 3 capteurs d'attitude, soit pour la connectique : 3 fois 6 entrées analogiques sur la carte ADAS ICV50 et l'alimentation des capteurs + une entrée synchro sur le module IP Digital24 de la carte MVME-162. Un câble avec 13 paires de fils a été utilisé avec côté rack 2 connecteurs DB50 et un connecteur pour +5 V et masse et à l'autre bout un connecteur DB25. Ce dernier arrive sur une boîte dont sort les 3 connecteurs DB25 vers les capteurs. La synchro des mesures devait être fourni par les semelles et ne demandait qu'une entrée TTL vers le rack avec une prise BNC à l'autre bout (deuxième câble à 2 fils). Elle s'est avérée inopérante : les semelles génèrent une impulsion négative de durée trop courte pour être prise en compte par notre système. Ensuite il a fallu connecter jusqu'à 8 sondes EMG alimentées avec + et - Vcc (Vcc pouvant être compris entre 2,5 et 15 Volts). Les EMGs ont 4 fils (+ et - Vcc, la masse et la sortie à mesurer). Pour être compatible avec le futur système d'acquisition du LIRMM, des connecteurs mini-Din 4pts ont été montés et une nouvelle boîte d'interface miniDin vers DB15 a été réalisée ainsi que le câble vers le rack (DB15 vers la boîte EMG et rajoût de fils sur le connecteur DB50 J2 de la carte ADAS. Les expérimentations se sont déroulées à Montbonnot avec les capteurs CEA et une sonde EMG avec le système dácquisition/reconstruction Optotrack de la RV qui pouvait fournir une source de synchronisation via un connecteur DB9 (passage à 0 sur une broche). Un autre source de synchronisation était utilisable : le passage à 0 du RTS (ou du DTR) d'une liaison RS232 libre de l'Onix sur lequel est branché l'Optotrack. Les acquisitions des données semelle (200 capteurs de pression) sont synchronisables sur front montant d'une horloge à 50 Hz. Pour que les acquisitions via la carte ADAS (CEA, EMG, ...), celles des semelles et les captures de mouvement via l'Optotrack soient en phase, un boîtier Synchro a été réalisé (implantation) : il permet de sélectionner par un commutateur, une source (RTS-RS232, Optotrack, TTL et un bouton poussoir) et de générer en sortie un front descendant de synchro plus une horloge à 50 Hz dont le premier front montant est synchrone du front descendant de la synchro. On peut voir sur le schema logique que le bouton poussoir a 2 rôles : il est à la fois source possible de synchronisation et il permet l'arrêt de faire remonter le signal de synchro et d'arrêter l'horloge. Attention : si le sélecteur de synchro est sur la position MANU, le fait d'agir sur le bouton poussoir va bien provoquer l'arrêt pendant le temps déterminé par la constante de temps RC associée au monostable, mais la remontée du signal initialiser une nouvelle synchro : en conséquence, pour l'arrêter, il faut mettre le commutateur en position autre que MANU avant d'actionner le bouton poussoir. (voir le schema donnant le timing). Puis sont arrivés de Aalborg les goniomètres avec une connectique différente : les amplificateurs associès aux capteurs, leurs potentiomètres de réglage de gain et d'offset ainsi que leurs alimentations sont dans un boîtier raccordable au système d'acquisition par des connecteurs BNC. D'où la nécessité de compléter le connecteur J2 de la carte ADAS et de réaliser un troisième boîtier de connexion avec embases BNC. Finalement les 32 entrées analogiques de la carte ADAS sont utilisés et un toron de câbles les relient aux 3 boîtes d'interface avec les capteurs Attitude, EMG et Gonio (brochage). -- DemarGroup - 03 Nov 2005Edit | Attach | Print version | History: r3 < r2 < r1 | Backlinks | View wiki text | Edit wiki text | More topic actions
Topic revision: r3 - 17 Jul 2007, SorayaArias


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Ideas, requests, problems regarding SedWiki? Send feedback