 |
|
You are here: SedWiki>Platforms/Misc Web>DocBip>BipZeromeca (17 Jul 2007, SorayaArias)Edit Attach
Zéro Mécanique de Bip
Version à jour : Gérard - 30 Aout 2005
Matériel utilisé- 1 réglet
- 1 équerre
- 1 pied à coulisse
- 1 régle à niveau
- 4 niveaux à bulle peu encombrant
- matériel pour bloquer le robot
- Se Mettre en position zéro mécanique approximative (souvent l'ancien zéro mécanique)
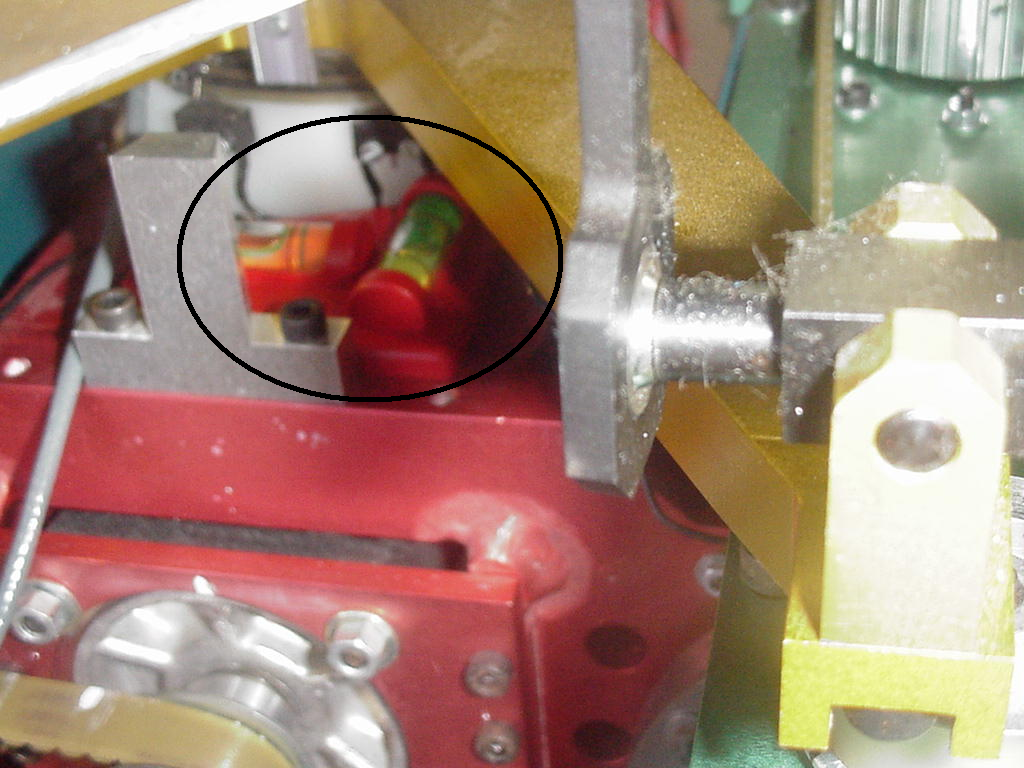
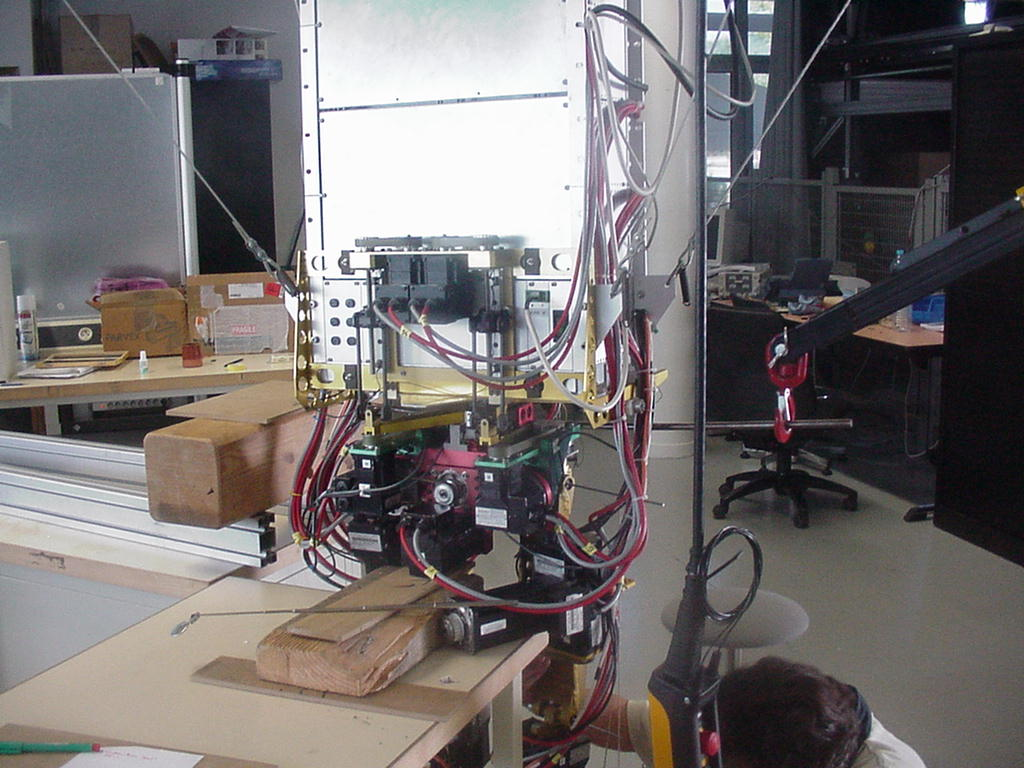
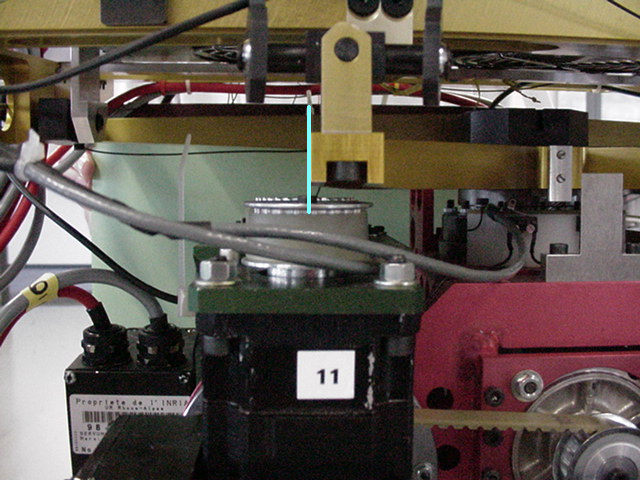
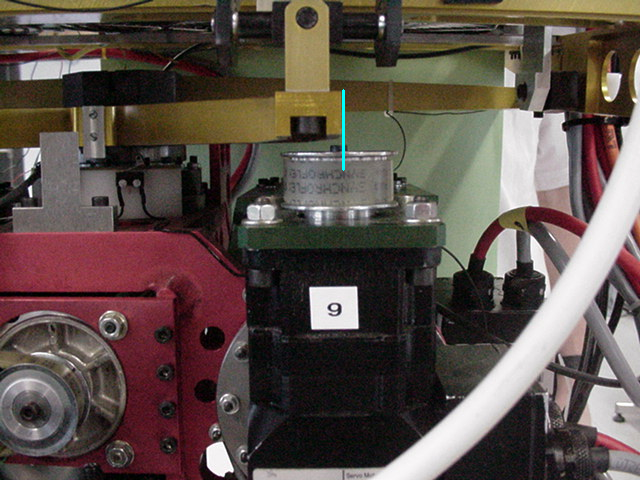
- Mettre le bassin (pièce rouge) en position horizontale en fixant le haut du robot (photos 1,2). Le contrôle se fait en positionnant 2 niveaux à bulle sur le bassin (photo 3). Les genous sont en butées mécaniques.
- Réglage jambe droite :
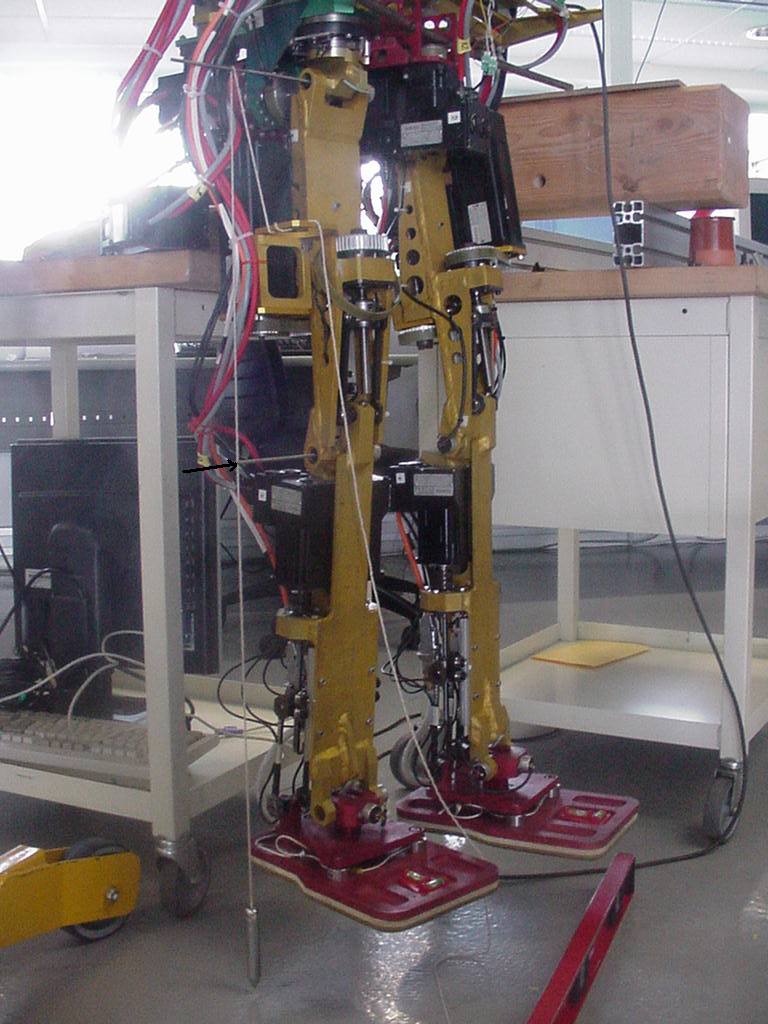
- Réglage hanche droite sagitalle. On enlève le moteur du genou pour pouvoir fixer une tige sur l'axe de rotation de la hanche (photo 4). On règle l'axe sagital hanche pour que l´axe de la cheville soit aligné avec le fil à plomb. On remet le moteur !
- Réglage axes chevilles. On positionne un niveau à bulle sur le pied et on règle les chevilles pour que le pied soit horizontal et donc dans le même plan que le bassin. Une variante du règlage consiste à placer le pied à l'équerre du tibia et d'ensuite remonter le pied de 5,78 degrés (par logiciel en utilisant la posture
ankle-ref.traj). - Réglage hanche frontale / cheville. On effectue un balayage (butée à butée) de la hanche en vertical. On rectifie le frontal hanche pour que le pied reste horizontal. On revient au zéro hanche vertical pour re-régler les chevilles. On effectue ce réglage itérativement jusqu'à que le pied reste horizontale lors du balayage vertical de la hanche.
- Réglage hanche vertical. Utiliser le logiciel (
menuBip). Mettre la hanche en butée. LancermenuBip, initialiser le driver et lire les codeurs (tours moteurs en radians). On peut vérifier que d'une butée à l'autre il y a 115.5 radians (à quelques dixièmes de radians prêt)> En lisant les codeurs revenir la hanche au centre (57.75 rad depuis une butée).
- Réglage jambe gauche :
- Soit on procéde comme pour la jambe droite,
- Soit on régle la jambe gauche par rapport à la jambe droite:
- Réglage tronc:
Vérification
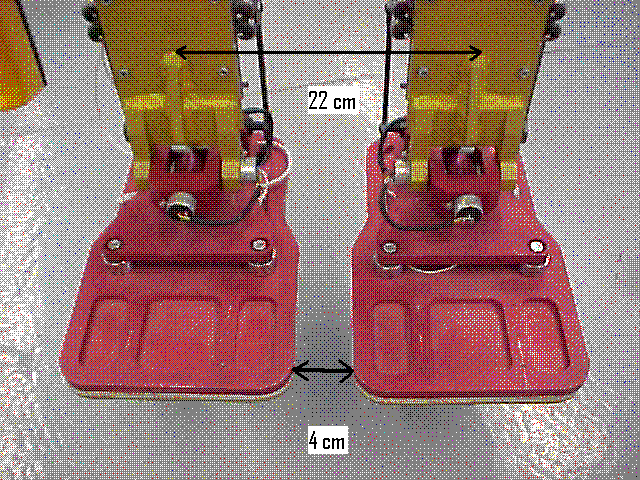
- En zéro mécanique :
- les pieds doivent être dans le même plan, à 4 cm de distance.
- les jambes sont distantes de 22 cm (centre à centre).
- bassin horizontal, le fil à plomb sur le moteur 12 doit passer au milieu des pieds.
-
ankle-ref.trajposture en l'air pour remonter les pieds de 5,78 degrés et vérifier que le pied fait 1 angle droit avec le tibia en sagital -
qt.trajposture en l'air en positionnant 1 fil à plomb sur le moteur 12 pour vérifier que les jambes et les pieds montent bien verticalement. -
qT.trajposture au sol pour vérifier que le tronc du robot est horizontal (sagital et frontal), que les appuis au sol sont équilibrés
Historique
- Version zéro : Version zéro


| I | Attachment | Action | Size | Date |
Who | Comment |
|---|---|---|---|---|---|---|
| |
Mise_en_zero_mecanique.doc | manage | 8 MB | 05 Jun 2003 - 14:25 | RogerPissard | Source de Mise_en_zero_mecanique.pdf |
| |
Mise_en_zero_mecanique.pdf | manage | 6 MB | 05 Jun 2003 - 14:25 | RogerPissard | Mise à zéro mécanique de Bip |
Edit | Attach | Print version | History: r6 < r5 < r4 < r3 | Backlinks | View wiki text | Edit wiki text | More topic actions
Topic revision: r6 - 17 Jul 2007, SorayaArias


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Ideas, requests, problems regarding SedWiki? Send feedback